はじめに
本稿の内容
2022年11月、東工大ロケットサークルCREATEはC-59Jを打ち上げ、団体初となるロール制御を行い成功しました。
本稿では、C-59Jの概要とロール制御の結果を説明します。
CREATEとは
CREATEは、全長1〜2m程度の小型ロケットを製作し打ち上げているサークルです。
図1および図2に過去に打ち上げたロケットの例を示します。
半年ほどかけ1機のロケットを完成させ、伊豆大島裏砂漠または秋田県能代市にて打ち上げています。

図1 打ち上がりランチャーを離脱するC-59J (2022年11月打ち上げ)

図2 ランチャーに挿入されたC-31J (2017年11月打上)
C-59Jの概要
C-59Jは、2022年11月、伊豆大島裏砂漠にて打ち上げられました。
動翼を用いたロール制御 (機軸回りの角度制御) および機体先端に設置したピトー管による対気速度の計測をミッションとしました。
機体姿勢の能動的な制御に挑戦するのは、CREATEとして初めての試みでしたが、成功することができました。
機体の全体構造
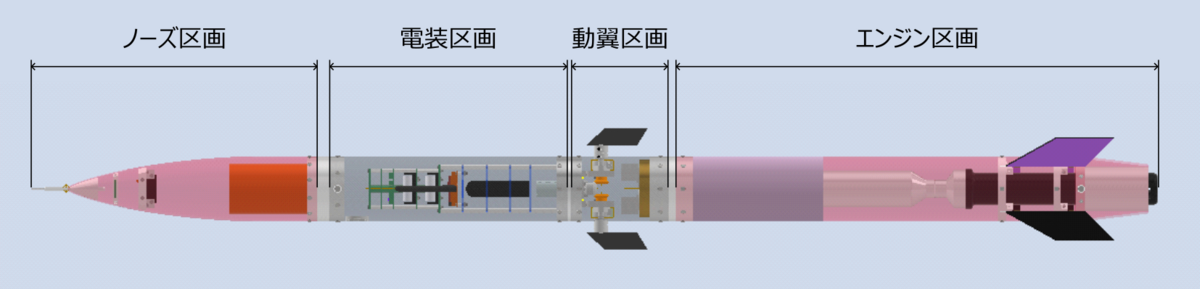
図3にC-59J全体のCAD図を示します。図3の左から大きく分けてノーズ区画、電装区画、動翼区画、エンジン区画があります。
①ノーズ区画
上空で開放するパラシュートが搭載されています。また、先端に対気速度を計測するためのピトー管が搭載されています。
②電装区画
基板および電池が搭載されています。基板は、下記の3つが搭載されています。
ミッション基板:ロール制御ミッション用の基板
開放基板:上空でパラシュートを開放し、機体を安全に着陸させるための基板
GPS基板:GPSセンサを用いて計測した座標を、地上へ無線送信するための基板
③動翼区画
ロール制御ミッションの鍵を握る部分です。図4にCAD図を示します。
1台のエンコーダ付きギアモータを用いて動かす、2枚の動翼が搭載されています。これらの動翼は、ミッション基板が制御します。
また、円筒型の機体の内側から外側方向を撮影する小型カメラが、2台搭載されています。
これらのカメラは、景色と動翼を映すことで、ロール制御の成否を視覚的に確認するために搭載しました。

図4 動翼区画のCAD図
④エンジン区画
ロケットを飛ばすために最も重要な、エンジンが搭載されています。
また、機体の姿勢を受動的に安定させるための、4枚の固定翼が搭載されています。
機体外観
図5、6に機体外観を示します。

図5 機体組み立て後、射点搬入まで待機中のC-59J

図6 打上直前、ランチャー挿入状態のC-59J
打上結果
飛行プロファイル
図7に飛行プロファイルを示します。横軸は離床を基準とした時刻、縦軸は気圧センサの値から算出した高度です。
C-59Jは、エンジン燃焼開始の直後に離床し、約0.4秒でランチクリアしました。
離床後約2.7秒で燃焼終了し、加えてロール制御を開始しました。
その後、7秒程度ロール制御を実施し、離床後約10.2秒でパラシュートを開放しました。
パラシュート開放後はロール制御を終了し、離床後約36.8秒で着地しました。
図6において、着地時点の高度が0mを下回っているのは、着地点の標高が射点の標高よりも低いことに因ります。

図7 飛行プロファイル
動画で確認
ロール制御の様子を、まず動画で確認してみましょう。
右側が、搭載したカメラで撮影した映像です。映っている黒い板は、動翼です。
中央上が、MEMSジャイロセンサを用いて計測した機体姿勢を、CGで再現した映像です。
中央下が、ロール角のグラフです。
左上が、エンコーダで計測した動翼角度を、CGで再現した映像です。
左下が、動翼角度のグラフです。
離床すると、C-59Jはロールしています。これは、固定翼のミスアラインメント、ノーズ形状の非対称性等により、ロールモーメントが発生したことに因ると考えられます。
その後、ロール制御が開始され、動翼が動くと、すぐにロールが止まっていますね!
データで確認
図8に、ロール角の時間変化を示します。
青色で示したロール制御開始前は、ロール角が変化していることが分かります。
一方、ロール制御開始後は、素早く目標ロール角に収束しています。

図8 ロール角の時間変化。ロール制御開始前を青色、開始後を赤色で示す。
図9に、ロール制御開始直後の、ロール角の時間変化を示します。
整定時のロール角を90度とみなすと、整定時間 (95%) はたったの0.27秒でした!

図9 ロール制御開始直後におけるロール角の時間変化
図10に、ロール制御開始からパラシュート開放付近までの、ロール角の時間変化を示します。
制御開始直後を除き、目標ロール角からの偏差が±4度以内に抑えられていることが分かります。

図10 ロール制御開始からパラシュート開放付近までのロール角の時間変化
図11に、動翼角度および目標動翼角度の時間変化を示します。
動翼角度は目標値に精度よく追従していることが分かります。
モータ軸に取り付けたエンコーダで計測しているので、ギアボックスおよび傘歯車のバックラッシが計測できない誤差として存在はしていますが。

図11 動翼角度および目標動翼角度の時間変化。動翼角度は、ロール制御開始前を青
色、開始後を赤色で示す。目標動翼角度は黒色で示す。
おわりに
今回は、2022年11月に打ち上げたC-59Jと、ロール制御結果の概要を紹介しました。
次回は、動翼区画とミッション基板のハードウェアについて、選定理由等を紹介する予定です。
次々回は、ロール制御系設計の詳細として、モデリング方法や制御ゲイン決定方法について紹介したいですねます。